Connector stops and locks | ||||||||||||
|
| |||||||||||
ProductsAbaqus/StandardAbaqus/ExplicitAbaqus/CAE
Defining connector stops
In the physical construction of most connectors the admissible position of one body relative to the other is limited by a certain range. In Abaqus these limits are modeled as built-in inequality constraints. You specify the available components of relative motion for which the connector stops are to be defined and the lower and upper limit values of the connector's admissible range of positions in the directions of the components of relative motion.
Input File Usage
Use the following options to define a connector stop:
CONNECTOR BEHAVIOR, NAME=name CONNECTOR STOP, COMPONENT=component number lower limit, upper limit
Abaqus/CAE Usage
Interaction module: connector section editor: : Components: component or components, Lower bound: lower limit, Upper bound: upper limit
Example
Since the shock in Figure 1 has finite length, contact with the ends of the shock determines the upper and lower limit values of the distance that node b can be from node a.
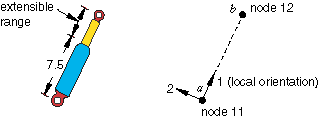
Assume that the maximum length of the shock is 15.0 units and that the minimum length is 7.5 units. Modify the input file presented in About connectors that is associated with the example in Figure 1 to include the following lines:
CONNECTOR BEHAVIOR, NAME=sbehavior ... CONNECTOR STOP, COMPONENT=1 7.5, 15.0
![]()
Defining connector locks
Connector mechanisms may have devices designed to lock the connector in place once a desired configuration is achieved. For example, a revolute connection might have a falling-pin mechanism that locks the rotational motion after achieving a desired angle. A user-defined connector locking criterion can be defined for connector elements that contain available components of relative motion. You can select the component of relative motion for which the locking criterion is defined.
Connector locks can be used to specify connector behavior for constrained as well as available components of relative motion. Limit values for force or moment can be specified for all components of relative motion involved in the connection. The force/moment used in evaluating the criterion is as computed in the output variable CTF. In addition, limit values can be specified for relative position corresponding to the available components of relative motion. If no other behavior is specified for an available component of relative motion, a force locking criterion will not be useful because CTF is zero.
In Abaqus/Explicit you can also specify the limiting values of velocity in the available components as a criterion for locking. Velocity-dependent locking criteria are useful in modeling seatbelt systems in automobiles (see Seat belt analysis of a simplified crash dummy). Moreover, the limiting values can be dependent on temperature and field variables. Field variable dependencies can be used to model time-dependent locks.
If the locking criterion specified for the selected component of relative motion is met, either all components lock or a single available component locks in place. By default, all components of relative motion are locked in place upon meeting the locking criterion. In this case the connector element will be completely kinematically locked from that point on. In dynamic analyses this locking may introduce high accelerations. You can specify if only a selected component of relative motion is locked.
Input File Usage
Use the following options to define a connector lock:
CONNECTOR BEHAVIOR, NAME=name CONNECTOR LOCK, COMPONENT=component number, LOCK=ALL or component number
Abaqus/CAE Usage
Interaction module: connector section editor: : Components: component or components, Lock: All or Specify component
Example
In the example in Figure 1 assume that relative rotations about the shock will lock if the force in the local 3-direction exceeds 500.0 units of force.
CONNECTOR BEHAVIOR, NAME=sbehavior CONNECTOR LOCK, COMPONENT=3, LOCK=4 , , -500.0, 500.0
![]()
Defining connector stops and locks in linear perturbation procedures
The status of connector locks or stops cannot change during a linear perturbation analysis; all connector stop and connector lock definitions remain in the same status as in the base state.
![]()
Output
The Abaqus output variables available for connectors are listed in Abaqus/Standard output variable identifiers and Abaqus/Explicit output variable identifiers. The following output variables are of particular interest when defining stops and locks in connectors:
- CSLST
Flags for connector stops and locks.
- CRF
Connector reaction forces/moments.
At a given time and for a particular component of relative motion i, the output variable CSLSTi is 1 if the connector is actually stopped or locked in that component (stop or lock criteria are met). In that case, the correspondent CRF output variable will most likely be nonzero and equal to the actual force/moment required to enforce the stop or lock constraint. Since CRF is included in the calculation of CTF, the latter will change as well when the lock or stop is active.
If the stop or lock criteria are not met at a given time for a particular component i, the output variable CSLSTi is 0 and in most cases the corespondent reaction force CRF is zero (the only possible exception is when a connector motion is also applied in that component).