Modeling contact interference fits in Abaqus/Standard | ||||||||
|
| |||||||
ProductsAbaqus/StandardAbaqus/CAE
Resolving excessive initial overclosures
If there are large overclosures in the initial configuration of model, Abaqus/Standard may not be able to resolve the interference fit in a single increment. Abaqus/Standard provides alternative methods that allow overclosures to be resolved gradually over multiple increments.
The default contact constraint imposed at each constraint location is that the current penetration is . Penetration exists when is positive. To alter this constraint, you can specify an allowable interference, , that will be ramped down over the course of a step. The specified allowable interference modifies the contact constraint as follows:
Thus, specifying a positive value for causes Abaqus/Standard to ignore penetrations up to that magnitude. Figure 1 illustrates a typical interference fit problem.
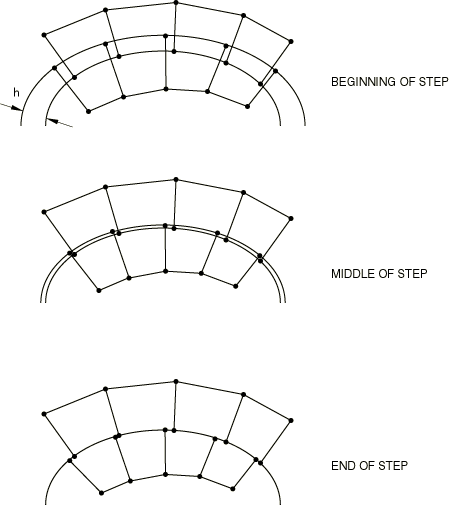
If the penetration in the model is , you may declare or request an automatic shrink fit. In either case Abaqus/Standard will consider the two bodies to be just in contact at the start of the simulation. As the allowable interference, , is decreased during the step, Abaqus/Standard pushes the surfaces apart until there is no more allowable penetration.
There are three different ways in which to specify the allowable interference, . By default, in all cases the value of the specified allowable interference is applied instantaneously at the start of the step and then ramped down to zero linearly over the step, unless you specify an amplitude reference that defines a particular allowable interference-time variation. It is recommended that you specify allowable interferences in a step separate from the rest of the analysis; additional loads may adversely affect the resolution of the interference fit and the response to loading with partially-resolved interferences may be non-physical. Once the overclosures are resolved, you can continue the analysis in a new step.
When the contact interference is specified, output variable COPEN does not reflect the actual overclosure value during the step; it reflects the actual value only at the end of the step.
You must specify the contact pairs or contact elements at which the allowable interference should apply.
Input File Usage
Use the following option to define an allowable interference for contact pairs:
CONTACT INTERFERENCE, TYPE=CONTACT PAIR slave surface, master surface, ...
Use the following option to define an allowable interference for contact elements:
CONTACT INTERFERENCE, TYPE=ELEMENT contact element set, ...
Abaqus/CAE Usage
Interaction module: interaction editor: : Gradually remove slave node overclosure during the step, Uniform allowable interference, Magnitude at start of step:
Element-based contact is not supported in Abaqus/CAE.
Using a nondefault amplitude curve for the allowable interference
You can define a time-varying allowable contact interference by creating an amplitude curve (see Amplitude Curves for details) and then referring to this curve from the contact interference definition. The amplitude will be ignored, however, if the Riks method (see Unstable collapse and postbuckling analysis) is used.
Input File Usage
CONTACT INTERFERENCE, AMPLITUDE=amplitude_curve_name
Abaqus/CAE Usage
Interaction module: interaction editor: : Gradually remove slave node overclosure during the step, Uniform allowable interference, Amplitude: amplitude_curve_name
Removing or modifying the allowable contact interferences
By default, only the allowable contact interferences defined or redefined by a particular contact interference definition will be modified. Alternatively, you can specify that all previously defined allowable contact interferences should be removed from the model and only those defined with this definition will remain.
Input File Usage
Use the following option to add or modify an allowable contact interference definition:
CONTACT INTERFERENCE, OP=MOD
Use the following option to remove all previously defined allowable contact interferences:
CONTACT INTERFERENCE, OP=NEW
Abaqus/CAE Usage
Contact interferences in Abaqus/CAE propagate along with the interaction for which they are defined. You cannot remove all previously defined contact interferences at once in Abaqus/CAE.
Specifying the same allowable contact interference for an entire surface
A single allowable interference can be specified for every node on the slave surface or every slave node in the specified set of contact elements. The concepts of slave nodes for the various families of contact elements are discussed in their respective sections. The specified allowable contact interferences are included in the current penetrations of the slave nodes reported in the message file when you request detailed contact printout. Thus, any slave node that penetrates the master surface by less than the allowable interference will be reported as being open.
Using the automatic “shrink” fit method
This method is applicable only during the first step of an analysis and requires no interference value. With this method Abaqus/Standard assigns a different to each slave node that is equal to that node's initial penetration (or zero if the point is initially open) except for the finite-sliding, surface-to-surface formulation, in which case the same value of , corresponding to the maximum penetration of the contact pair, is assigned to all constraints that are initially closed. These automatically calculated allowable contact interferences are not included in the current penetrations reported in the message file when detailed contact printout is requested.
When the automatic “shrink” fit method is used, only the default amplitude curve, a linear ramp to zero magnitude, can be used.
Input File Usage
CONTACT INTERFERENCE, SHRINK
Abaqus/CAE Usage
Interaction module: interaction editor: : Gradually remove slave node overclosure during the step, Automatic shrink fit
Applying an allowable contact interference with a shift vector
In this method you specify a uniform allowable interference and a direction . The allowable interference value, , defines the magnitude of a shift vector. A relative shift is applied to the slave nodes before Abaqus/Standard determines the contact conditions. In certain applications, such as contact simulations of threaded connectors, shifting the surfaces in a specified direction is more effective than simply allowing an interference.
Figure 2 illustrates the potential difference that can result when using an allowable contact interference with a shift vector rather than using a uniform allowable contact interference. In case (a) a shift direction is defined as well as an allowable interference , while in case (b) the standard approach is used, with an allowable interference .
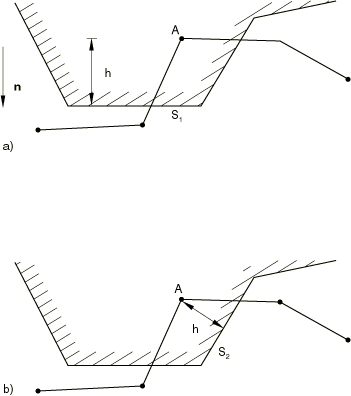
The magnitude of is the same in both cases, but it is less than the penetration in case (a) and more than the penetration in case (b). In case (a) contact is detected immediately for slave node A, and the penetration is resolved with that node sliding along segment because node A is shifted in the direction before Abaqus/Standard checks for contact. After the shift Abaqus/Standard determines that node A is closest to segment and moves the node onto that segment. In case (b) slave node A detects contact with segment because that is the closest segment when node A remains in its initial position. Thus, node A will slide along segment if no shift direction is provided.
Input File Usage
CONTACT INTERFERENCE slave surface, master surface, , X-direction cosine of , Y-direction cosine of , Z-direction cosine of ...
Abaqus/CAE Usage
Interaction module: interaction editor: : Gradually remove slave node overclosure during the step, Uniform allowable interference, Magnitude at start of step: , Along direction:
![]()
Interference fits for surface-to-surface discretization
Because contact conditions are enforced in an average sense in a region around each constraint location for surface-to-surface contact, penetrations or gaps may be observed at slave nodes when surface-to-surface constraints are in a zero-penetration state.
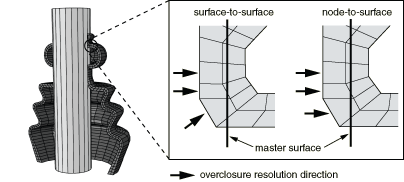
Large interferences may be difficult to resolve with the finite-sliding, surface-to-surface formulation. Using this formulation, overclosures tend to be resolved along the slave facet normal directions; using node-to-surface contact, overclosures tend to be resolved along the master surface normal directions. Figure 3 illustrates a case where differing normal directions lead to undesirable tangential motion during an interference fit. In some cases it may be preferable to resolve large initial overclosures with node-to-surface discretization.
![]()
Friction and contact interferences
Frequently, an actual assembly process is modeled as an interference fit problem. If frictional interface properties are desired, they should usually be introduced after the initial interference has been resolved. The initial interference problem should be modeled under frictionless conditions since the physical assembly process is not typically modeled exactly. Friction can be introduced in subsequent steps (see Changing friction properties during an Abaqus/Standard analysis).