Flexible joint element | ||||||
|
| |||||
ProductsAbaqus/Standard
Kinematics
A JOINTC element consists of two nodes, referred to here as nodes 1 and 2. Each node has six degrees of freedom: displacements and rotations . A local orientation is defined for the element by the user. In a large-displacement analysis that local system rotates with the first node of the element.
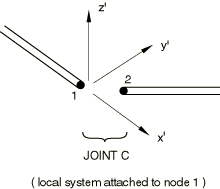
We define the local system by its unit, orthogonal base vectors, , for . Then at any time in the analysis
where is the rotation matrix defined by the rotation at the first node of the element.
The relative displacements in the element are then
with first variations
where is a linearized rotation field (see Rotation variables), and second variations
The relative rotation about the local 3-axis is defined as
with and defined by cyclic permutation of the local direction indices.
These rotation measures define only relative angular rotations for small relative rotations. They are simple to compute, increase monotonically for relative rotations up to 180°, and are taken as suitable for use in the elements for these reasons.
The first variation of is
and its second variation is
The relative translational velocities in the element are taken as
and the relative angular velocity about the local 3-axis is taken as
![]()
Virtual work
The virtual work contribution of the element is
We assume that the behavior of the joint is defined by
The contribution to the operator matrix for the Newton solution is
where is defined by the dynamic time integration operator.