*MAP SOLUTION | ||||||
|
| |||||
ProductsAbaqus/Standard
TypeModel data
LevelModel
Optional parameters
- INC
-
Set this parameter equal to the increment number from which the old solution will be read. If this parameter is omitted, the last increment for which a solution is available will be read.
The STEP parameter must be specified if the INC parameter is used.
- STEP
-
Set this parameter equal to the step number from which the old solution will be read. If this parameter is omitted, the last step and increment for which a solution is available will be read.
- UNBALANCED STRESS
-
Set UNBALANCED STRESS=RAMP (default) if the stress unbalance is to be resolved linearly over the step.
Set UNBALANCED STRESS=STEP if the stress unbalance is to be resolved in the first increment.
![]()
Data line to translate an old-model mesh
- First (and only) line
Value of the translation to be applied in the X-direction.
Value of the translation to be applied in the Y-direction.
Value of the translation to be applied in the Z-direction.
![]()
Data lines to translate and/or rotate an old-model mesh
- First line
Value of the translation to be applied in the X-direction.
Value of the translation to be applied in the Y-direction.
Value of the translation to be applied in the Z-direction.
Enter values of zero to apply a pure rotation.
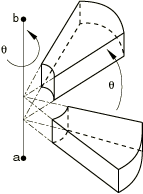
- Second line
X-coordinate of point a on the axis of rotation (see Figure 1).
Y-coordinate of point a on the axis of rotation.
Z-coordinate of point a on the axis of rotation.
X-coordinate of point b on the axis of rotation.
Y-coordinate of point b on the axis of rotation.
Z-coordinate of point b on the axis of rotation.
Angle of rotation about the axis a–b, in degrees.
If both translation and rotation are specified, translation is applied before rotation.