ROTATION | |||||||||
|
| ||||||||
ProductsAbaqus/StandardAbaqus/ExplicitAbaqus/CAE
Description
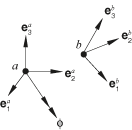
The rotation connection does not impose kinematic constraints. The rotation connection is a finite rotation connection where the local directions at node b are parameterized relative to the local directions at node a by the rotation vector. Let be the rotation vector that positions local directions relative to ; that is,
for all , where is the skew-symmetric matrix with axial vector . See Rotation variables for a discussion of finite rotations.
The available components of relative motion in the ROTATION connection are the change in the rotation vector components positioning the local directions at node b relative to the local directions at node a. Therefore,
where is the initial rotation vector, is an integer accounting for rotations with magnitude greater than , all vector components are components relative to the local directions , and . The connector constitutive rotations are
The kinetic moment in a rotation connection is
In two-dimensional and axisymmetric analyses and .
![]()
Summary
| ||||||||||||||||||||||||