Eulerian mesh motion | ||
| ||
An airbag where the inflator gas is modeled as an Eulerian material: the gas initially occupies a small region, but the region quickly expands as the airbag inflates.
A projectile impact analysis where the projectile is modeled as an Eulerian material: the projectile initially occupies a region that is far from its ultimate destination.
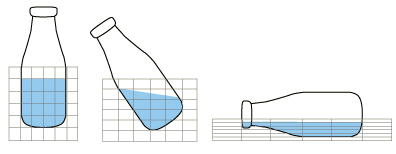
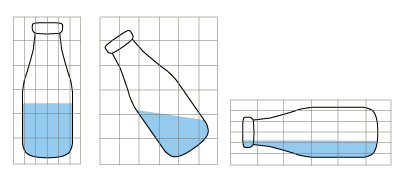
In such cases it is possible to adjust the size and location of the Eulerian domain during the analysis so that it always captures a part or material of interest. By default, an Eulerian mesh is rigid and fixed in place; but enabling Eulerian mesh motion allows the Eulerian elements to scale and translate during the analysis. Eulerian mesh motion can follow the deformation of an Eulerian material instance (as shown in Figure 1) or a Lagrangian surface (as shown in Figure 2). The behavior of Eulerian mesh motion is described in detail in Eulerian mesh motion.
In Abaqus/CAE Eulerian mesh motion is defined as a boundary condition in the Load module. Restrictions can be imposed on the scaling and translation of the Eulerian mesh as part of the boundary condition definition. For more information about creating Eulerian mesh motion boundary conditions, see Defining an Eulerian mesh motion boundary condition.