Self-Oganizing Maps Example | ||
| ||
The model used in this example shows the problem of sizing a passenger airplane and maximizing the range and the number of passengers subject to a maximum stall speed. The following figure shows an example subflow that computes the range, stall speed, and the total loaded weight of the airplane given the cruise velocity, fuselage dimensions, wing dimensions, and number of passengers.

The following figure shows the self-organizing maps constructed using 100 Orthogonal Latin Hypercube data points (only three parameters are shown).
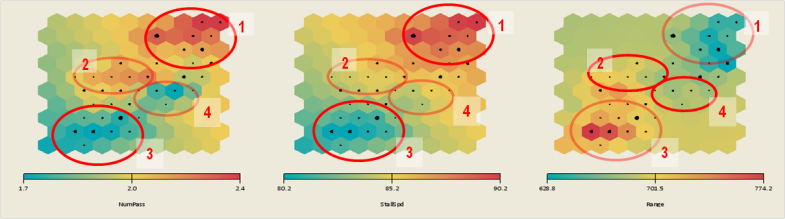
Because the problem is trying to maximize both the range and the number of passengers, you look for cells shaded red. There are four clusters, three of which are of importance. Clusters 1 and 2 have a high number of passengers; cluster 1 also has a high stall speed; cluster 3 has a high range. Cluster 4 has a low number of passengers and a low range.
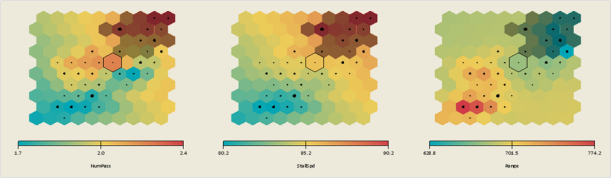
If you add the stall speed constraint in the Runtime Gateway Parameters tab as shown below:

then some of the cells in the self-organizing maps are now shaded dark to identify them as infeasible. Therefore, out of the three clusters, only clusters 2 and 3 indicate promising regions in the design space where further trade-off studies can be performed.
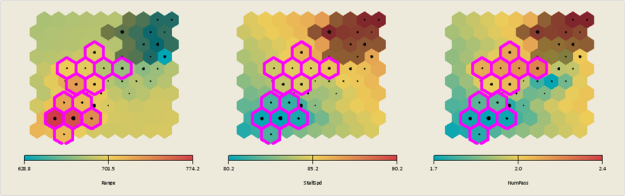
The data points in clusters 2 and 3 can be selected by selecting the cells in the self-organizing maps as shown in the following figure:
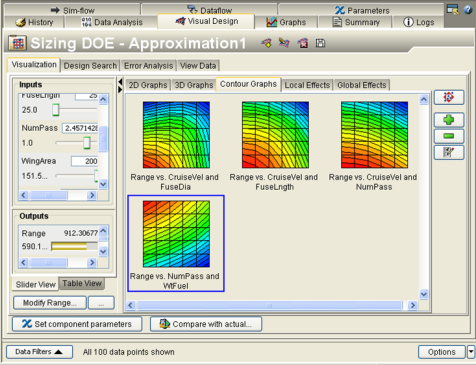
These data points can then be used for further exploration. For example, an approximation can be created from the Runtime Gateway Visual Design tab using the selected points, and used for multi-objective optimization studies as shown in the following figure: