Simple Importance Sampling | ||||
|
| |||
In other words, the mean value of this new sampling density function is the MPP, whereas the variance is the same as the original density function. If is the standard normal probability density function, where is the mean and is the variance, then the probability density function of the sample set is while that of the original problem is .
Simple importance sampling estimates the probability as follows (Man-Suk, 1989):
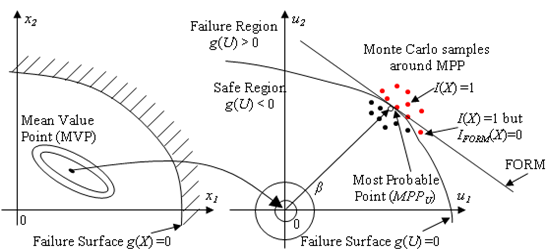
where are samples drawn around the MVP, are samples drawn around the MPP, and I(X or Y) is an indicator function such that
FORM uses a linear approximation of the constraint surface (see the figure above) to compute the probability of failure as
,
where is the standard normal distribution function and is the distance to the MPP in U-space. If the failure function is nonlinear or the random variables are not normally distributed, the FORM estimate can be corrected using importance sampling as followed (Man Mok, 2003):
where is the indicator function of the linear approximation used by FORM defined as
where is the MPP in U-space.
The probability of failure obtained by correcting the FORM estimate is more accurate than that obtained using simple importance sampling only when the following conditions are satisfied:
- the constraint is nearly linear,
- the MPP search converges to a point on the constraint, and
- the number of samples is very low.